引言
在 JDK1.5 之前,一般是靠 synchronized 关键字来实现线程对共享变量的互斥访问。synchronized是在字节码上加指令,依赖于底层操作系统的Mutex Lock实现。
而从JDK1.5以后,Java界的一位大神—— Doug Lea 开发了AbstractQueuedSynchronizer(AQS)组件,使用原生Java代码实现了synchronized语义。换句话说,Doug Lea没有使用更“高级”的机器指令,也不依靠JDK编译时的特殊处理,仅用一个普普通通的类就完成了代码块的并发访问控制,比那些费力不讨好的实现不知高到哪里去了。
java.util.concurrent包有多重要无需多言,一言以蔽之,是Doug Lea大爷对天下所有Java程序员的怜悯。
AQS定义了一套多线程访问共享资源的同步器框架,是整个java.util.concurrent包的基石,Lock、ReadWriteLock、CountDowndLatch、CyclicBarrier、Semaphore、ThreadPoolExecutor等都是在AQS的基础上实现的。
CAS(Compare And Swap)
CAS 指的是现代 CPU 广泛支持的一种对内存中的共享数据进行操作的一种特殊指令。这个指令会对内存中的共享数据做原子的读写操作。简单介绍一下这个指令的操作过程:
首先,CPU 会先获取这个要修改的值的当前值,然后进行一个原子修改操作。在这个原子操作内部,会再次当这两个值相等时,CPU 才会将内存中的数值替换为新的值。否则便不做操作。最后,CPU 会将旧的数值返回。
这一系列的操作是原子的。它们虽然看似复杂,但却是 Java 5 并发机制优于原有锁机制的根本。简单来说,CAS 的含义是“我认为原有的值应该是什么,如果是,则将原有的值更新为新值,否则不做修改,并告诉我原来的值是多少”。
CAS通过调用JNI(Java Native Interface)调用实现的。JNI允许java调用其他语言,而CAS就是借助C语言来调用CPU底层指令实现的。Unsafe是CAS的核心类,它提供了硬件级别的原子操作
Doug Lea大神在java同步器中大量使用了CAS技术,鬼斧神工的实现了多线程执行的安全性。CAS不仅在AQS的实现中随处可见,也是整个java.util.concurrent包的基石。
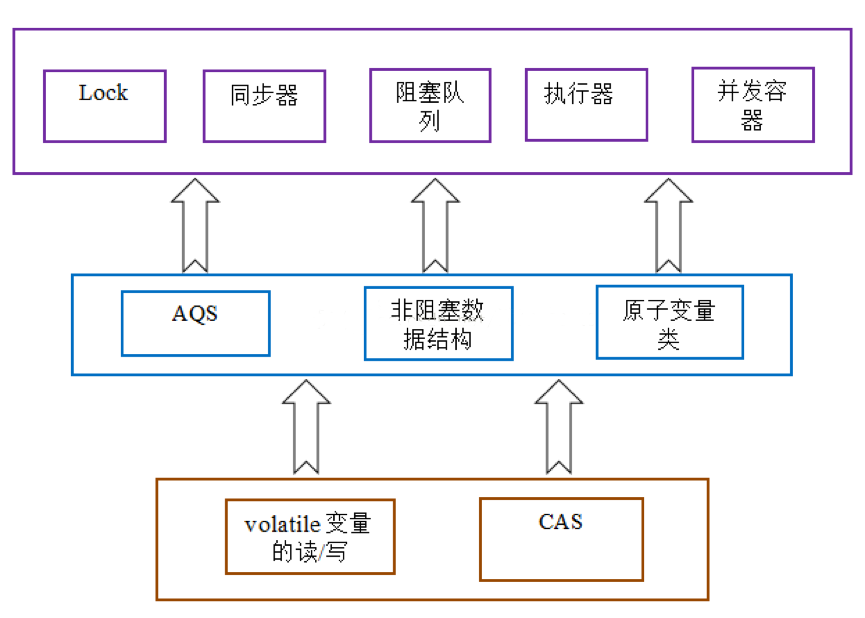
AQS,非阻塞数据结构和原子变量类(java.util.concurrent.atomic包中的类),这些concurrent包中的基础类都是使用这种模式来实现的,而concurrent包中的高层类又是依赖于这些基础类来实现的。从整体来看,concurrent包的实现示意图如下:
在Java中,sun.misc.Unsafe 类提供了硬件级别的原子操作来实现这个CAS。 java.util.concurrent 包下的大量类都使用了这个 Unsafe.java 类的CAS操作。
同步队列
当共享资源被某个线程占有,其他请求该资源的线程将会阻塞,从而进入同步队列。就数据结构而言,队列的实现方式无外乎两者一是通过数组的形式,另外一种则是链表的形式。AQS中的同步队列则是通过链式方式进行实现。接下来,很显然我们至少会抱有这样的疑问:
- 节点的数据结构是什么样的?
- 是单向还是双向?
- 是带头结点的还是不带头节点的?
我们依旧先是通过看源码的方式。
在AQS有一个静态内部类Node,其中有这样一些属性:
//节点状态
volatile int waitStatus
//节点状态
volatile Node prev x
//当前节点/线程的后继节点
volatile Node next;
//加入同步队列的线程引用
volatile Thread thread;
//等待队列中的下一个节点
Node nextWaiter;
现在我们知道了节点的数据结构类型,并且每个节点拥有其前驱和后继节点,很显然这是一个双向队列。同样的我们可以用一段demo看一下。
public class LockDemo {
private static ReentrantLock lock = new ReentrantLock();
public static void main(String[] args) {
for (int i = 0; i < 5; i++) {
Thread thread = new Thread(() -> {
lock.lock();
try {
Thread.sleep(10000);
} catch (InterruptedException e) {
e.printStackTrace();
} finally {
lock.unlock();
}
});
thread.start();
}
}
}
实例代码中开启了5个线程,先获取锁之后再睡眠10S中,实际上这里让线程睡眠是想模拟出当线程无法获取锁时进入同步队列的情况。通过debug,当Thread-4(在本例中最后一个线程)获取锁失败后进入同步时,AQS时现在的同步队列如图所示:
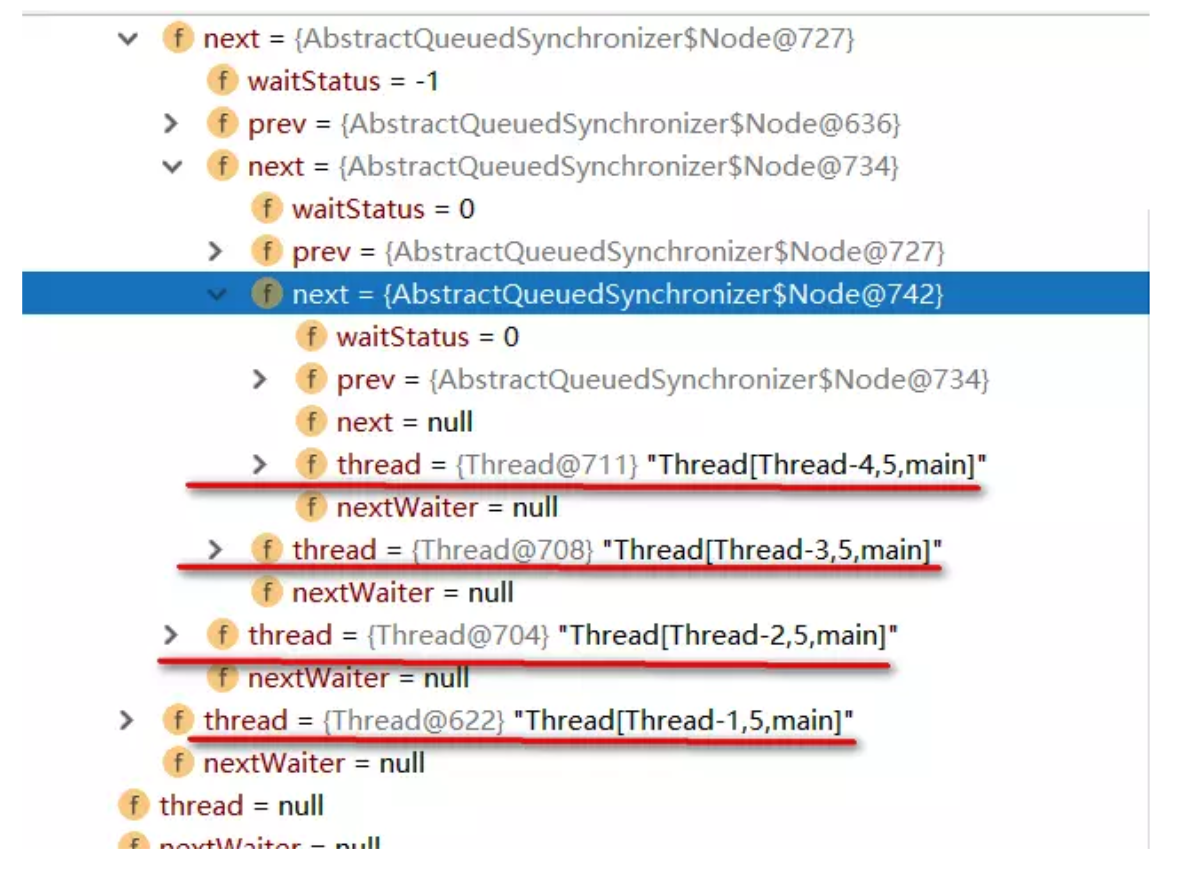
Thread-0先获得锁后进行睡眠,其他线程(Thread-1,Thread-2,Thread-3,Thread-4)获取锁失败进入同步队列,同时也可以很清楚的看出来每个节点有两个域:prev(前驱)和next(后继),并且每个节点用来保存获取同步状态失败的线程引用以及等待状态等信息。另外AQS中有两个重要的成员变量:
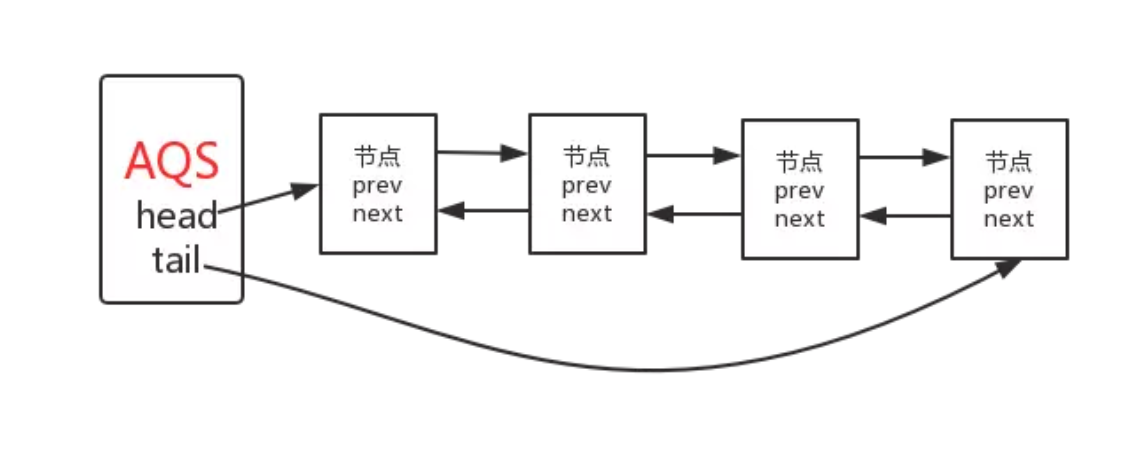
private transient volatile Node head;
private transient volatile Node tail;
也就是说AQS实际上通过头尾指针来管理同步队列,同时实现包括获取锁失败的线程进行入队,释放锁时对同步队列中的线程进行通知等核心方法。其示意图如下:
通过对源码的理解以及做实验的方式,现在我们可以清楚的知道这样几点:
- 节点的数据结构,即AQS的静态内部类Node,节点的等待状态等信息;
- 同步队列是一个双向队列,AQS通过持有头尾指针管理同步队列;
那么,节点如何进行入队和出队是怎样做的了?实际上这对应着锁的获取和释放两个操作:获取锁失败进行入队操作,获取锁成功进行出队操作。
Reference
- 深入理解AbstractQueuedSynchronizer(AQS) - https://juejin.im/post/5aeb07ab6fb9a07ac36350c8
- AQS深度剖析 - https://blog.csdn.net/u012152619/article/details/74977570